制作:(株)日さく
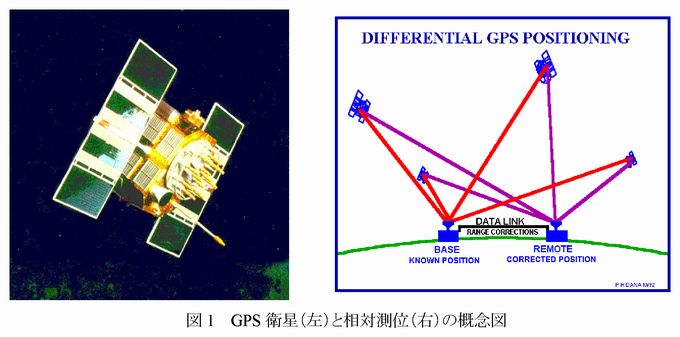
精密測量としてのGPS(Global Positioning System)は、ナビゲーション等で一般に用いられる単独測位ではなく、相対測位(Differential GPS)と呼ばれる2台以上の受信機によって測点間の相対的な位置を測定する方法が用いられます。地すべり移動量の計測ではmmオーダーの精度が必要となることから、GPS干渉測位方式(GPS Carrier Phase Positioning)という技術による測定(搬送波位相を用いる計測)を行っています。これ以降、干渉測位方式のGPSをここでは単に“GPS計測”と呼ぶことにします。
“GPS計測”では基準点と測点間の相対的な位置を測ることから、この相対位置のことを基線(Baseline)といいます(図1)。光波(トータルステーション)を使った従来の測量では、基線の距離や角度はその場でデータとして見ることができますが、”GPS計測”では測点の受信機から得られるものは、電子的に記録された搬送波位相角の数字の羅列です。相手の基準点の同じようなデータを組合せて解析(基線解析)してはじめて、距離・角度のデータが得られるのです。
“GPS計測”と光波測量の結果を精度で比較すると、地すべり移動量計測程度の基線長(最大で2km程度)であればどちらも1cm以内に収まり、両者はほぼ同じような精度が期待できます。基線解析には、パソコンと専用のソフトウェアを用いた複雑な演算処理が必要となり、一般的にはその場で距離や角度のデータを見ることは難しいです。また精度を確保するためには、原理的には常に同時に4個以上(できれば5個以上)の衛星から電波を受信している必要があります。 それでは、このような面倒くさい手順を踏んでも”GPS計測”を行う利点があるのでしょうか?
“GPS計測”は
1)基線長が数km以内であれば天候の影響をほとんど受けない(全天候性)
2)基準点と各測点で同じ人工衛星が見えればよい(視通が不要)
3)現場に受信機を設置(固定)してスイッチを入れるだけで計測が可能(熟練が不要)
4)電源供給・データ転送の条件が整えば自動計測で連続観測が可能(全自動計測)
というようなすばらしい特徴を備えているのです。
“GPS計測”結果のばらつき
“GPS計測”では、基線長が数km程度の場合、GPSが本来持っている誤差である衛星からの電波経路の状態(電離層・大気中の水蒸気量)による影響が相殺され、きわめて正確な値が得られるという特徴があります。しかし、この場合でも衛星の幾何学的な配置・電波経路上の障害物・衛星軌道情報の誤差・受信機による距離の測定誤差等によって、測定結果のばらつきが発生します。このような統計的な分散は、データを統計処理することによって精度を向上させることができます。統計処理手法としては、標準偏差による棄却や最小二乗法等の手法がよく用いられ、基線解析を実施する際にソフトウェアが自動的に処理を行っています。
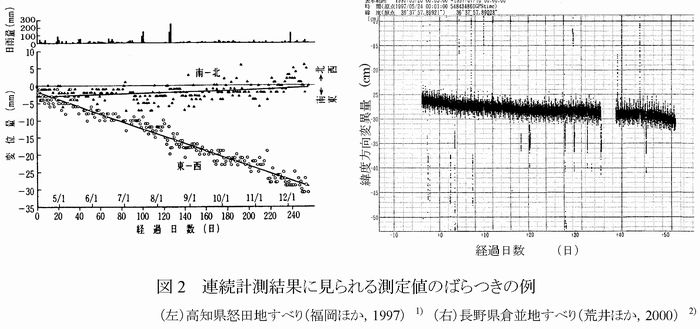
図2は実際に地すべり地で移動量を連続的に”GPS計測”した例です。怒田地すべりでは、1日1回3時間を1セッションとして測定した結果をプロットし、倉並地すべりでは、1セッション1分で連続的に計測した結果を全てプロットしたものです(点が集中して黒い帯となっている)。
このグラフは、ソフトウェアが上記の統計処理を行った計測値をプロットしていますが、それでもなお、このようなばらつきが現れます。グラフには一般的な計測の誤差である不規則誤差のほかに、数日おきに非常に大きな変動も記録されています。ここに見られる計測結果のばらつきは、何種類かの計測誤差が重なり合うことによって生じているために、システムの性質を考慮しながら適切なデータ処理方法でノイズ除去を行う必要があります。
“GPS計測”結果のノイズ処理の例
1.移動平均処理
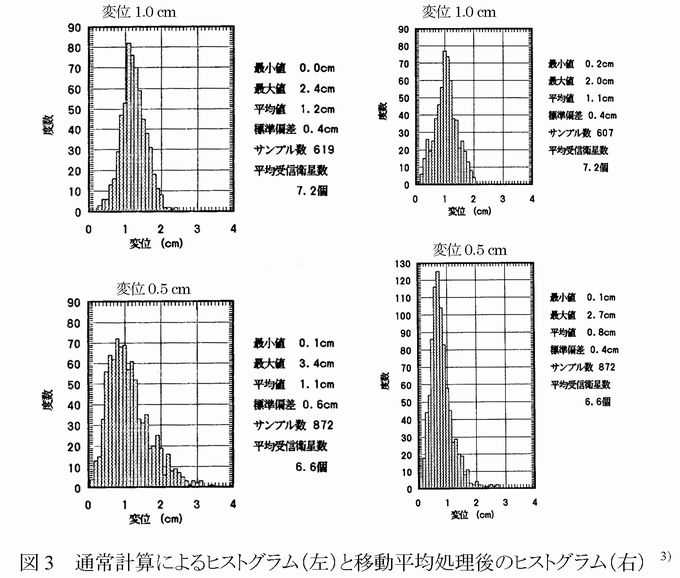
近藤 ほか(1996) 3)は”GPS計測”の測定結果の精度改善策の一つとして、移動平均処理を用いたシミュレーション実験を行っています。実験は、アンテナを水平に一定距離を移動させ、2分静止させた後再び同じ距離を移動させることを繰り返し行い、この間20秒周期で計測点の座標を求めています。このときのアンテナの移動距離は、1.0cmと0.5cmです。
計測された座標を用いて移動距離を計算し、度数分布図にまとめたのが図3です。右側の図は、ある時刻の座標を、その時点から過去1分間に得られた座標を平均して求め(つまり、3回の移動平均を取っています)、同様に移動距離を計算して度数分布図にまとめたものです。
このように、移動平均処理を行った結果、1.0cmの変位を与えた実験に対しては平均値が1.2cmから1.1cmに、また0.5cmの変位を与えた実験に対しては、平均値が1.1cmから0.8cm、さらに標準偏差が0.6cmから0.4cmに改善されていることがわかります。
連続的な”GPS計測”の統計処理に用いる平滑化手法の条件としては、
1)長期にわたって計測結果に適用できる
2)計測誤差などの偶然の変動に影響されにくい
3)シンプルで現場においても適用性が高い、などが要求されます。このような条件に合う最も簡単なモデルとしては、多項式回帰分析モデルが知られています。
しかし、多項式回帰モデルは真の挙動が実際には多項式に従わない場合に、挙動の変化にうまく追従できなかったり、偶然の変動を拾いやすいという欠点があります。トレンドモデルは、モデルに確率構造を与えることによって、計測データに追随しすぎて偶然の挙動を拾うという、多項式回帰分析モデルの欠点を改善することを目指して開発されました(清水 ほか(1998) 4))。
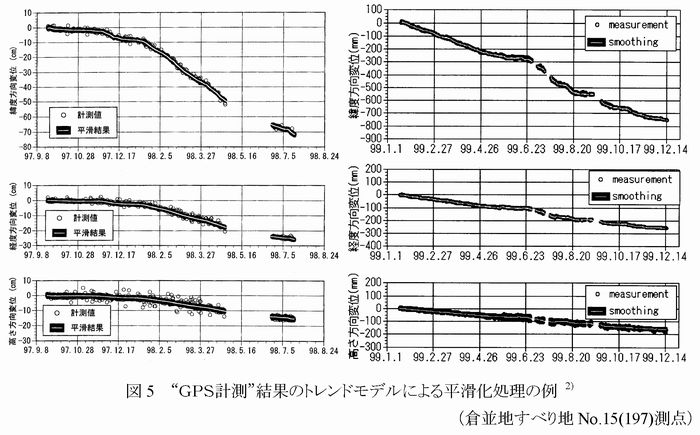
“GPS計測”の実証実験では、トレンドモデルによって平滑化処理を実施することで、緯度・経度・高さのいずれの成分に対しても、2mmのステップ状変位および0.5mm/日の速度の変位を検出しています。これは”GPS計測”の一般的な検出精度である、水平方向5mm高さ方向10mmを大きくしのぐ結果です。
前出の長野県倉並地すべり地では、1996年12月より、有線によって電源供給とデータ伝送を行うリアルタイムオンライン方式を用いて連続的な”GPS計測”を行い、1999年からは太陽電池を電源とするオフライン受信機に切換えて連続計測を行いました(図4)。オフライン受信機では、1セッション1時間で連続的に計測しています。

ノイズ処理の今後の課題
“GPS計測”では、統計処理等を用いてノイズ処理を行うことによって、mmオーダーの計測精度を確保することは十分可能です。そのため、自動計測の簡便性という特徴からも、地すべり移動状況のモニタリングに活用できるものと考えられます。しかし、GPSの測定結果には原理的にばらつきが含まれており、モニタリングに使用した場合、計測される大きな変位が誤差による異常値なのか、本当に地盤が大きく移動したのかを正確に判定することが求められます。地すべりの監視業務のための全自動システムとして”GPS計測”を活用する場合には、この点で解決されるべき多くの課題が残されていると思われます。
引用文献
1. 福岡浩・江崎豊充・児玉信之:GPS測量による地すべり移動観測,土と基礎,Vo1.45,No.6,pp.29-31,(1997)
2. 荒井正・渡辺 寛・伊藤健二・会津隆士・清水則一:GPSによる地すべり移動観測データの処理に関して-特に観測精度の向上とモニタリングの可能性-,第39回地すべり学会研究発表講演集,pp.365-368,(2000)
3. 近藤仁志・M.Elizabeth Cannon・清水則一・中川浩二:GPSによる地盤変位モニタリングシステムの開発,土木学会論文集,No.546/Ⅵ-32,pp.157-167,1996
4. 清水則一・足立寛・小山修治:GPS変位モニタリングシステムによる斜面変位計測結果の平滑化に関する研究,資源素材学会誌,Vol.114,No.6,pp.397-402,1998